قیمت 19,000 تومان
مدلسازی دینامیکی و شبیه سازی مبدل باک و مبدل بوست
مدلسازی دینامیکی و شبیهسازی مبدل باک و مبدل بوست
مبدل باک و مبدل بوست
فصل اول: مقدمه.
1-1 مبدلهای dc به dc.
1-2 میانگین فضای حالت…
1-3 کنترل حالت جریان.
1-4 محرک برای این کار.
1-5 مدلها برای مبدلهای dc به dc بدون کنترل کننده ها
1-6 مدلها برای کنترل حالت جریان.
1-7 تأثیر بار روی دینامیک مبدل.
1-8 استفاده جریان بار برای کنترل.
فصل دوم: مروری بر گذشته و کارهای انجام شده در زمینه مدلسازی دینامیکی و شبیهسازی مبدل باک و مبدل بوست…
2-1 کارهای انجام شده در گذشته در زمینه مدلسازی دینامیکی و شبیه سازی مبدل بوست…
2-2 کارهای انجام شده در گذشته در زمینه مدلسازی دینامیکی و شبیهسازی مبدل باک..
2-2-1حذف ریپل..
2-2-2: شبیهسازی گذرا برای تغییر بار.
2-2-3: تغییر ولتاژ ورودي..
2-2-4: تغییرات ولتاژ تغذیه و بار.
2-2-5: اصول نگهداری انرژی..
2-2-6: مدل مدار دینامیک سیگنال بزرگ…
2-2-7: محدودیت نسبت کاری..
2-2-8: مدل مدار معادل DC..
2-2-9: مدل مدار معادل سیگنال کوچک…
فصل سوم: بررسی کارهایی که در زمینه این تحقیق باید انجام شود.
3-1 مبدل باک..
3-1-1 یکسوسازی سنکرون.
3-1-2 تعادل ولتاژ دوم القاگر.
3-1-3 تعادل شارژ خازن.
3-2 مبدل بوست…
3-3 شبیهسازی مبدل بوست و مبدل باک..
منابع
مبدل باک و مبدل بوست

مقدمه
دراین تحقیق سعی شده است که مدلسازی دینامیکی و شبیهسازی مبدل باک و مبدل بوست بررسی شود که در ابتدا فصل اول مقدمه و بعد در فصل دوم سابقه این کارها بیان میشود. در فصل سوم کارهایی که باید انجام شود ، مطرح میشود و در فصل چهارم نتایج و نمودارها و فصل پنجم شامل نتیجه گیری میباشد.اما در مورد مبدلهای dc به dc توضیحاتی داده میشود:
مبدلهای dc به dc
اینمبدل ها ولتاژ ورودی dc را به ولتاژ خروجی dc تبدیل میکنند (با یک اندازه دیگر نسبت به ولتاژ ورودی). مورد مطلوب این است که تبدیل با تلفات کم در مبدل انجام شود.
در این مبدل هاترانزیستور نمیتواند در فاصله میانی خطیاش کار کند. اما می تواند به عنوان کلید به کار گرفته شود .سیگنال کنترل دوتایی میباشد. مادامی که ترانزیستور روشن است، ولتاژ میانی کم میشود یعنی تلفات توان در ترانزیستور کم میشود. مادامی که ترانزیستور خاموش است، جریان میانی کم میشود و تلفات توان کم میشود. برای به دست آوردن تلفات کم مقاومتها در مبدلها اجتناب میشوند. خازنها و القاگرها چون به طور ایدهآل تلفاتی ندارند، استفاده میشوند.
عناصر الکتریکی میتوانند ترکیب شوند و به یکدیگر به شکل های مختلف متصل شوند. توپولوژیهای نامیده شده خواص مختلف دارند. مبدل باک یک ولتاژ خروجی دارد که کمتر از ولتاژ ورودی میباشد. مبدل بوست یک ولتاژ خروجی دارد که بیشتر از ولتاژ ورودی میباشد (در حالت ماندگار). (جوهانسون[1]، 2004)
میانگین فضای حالت
مبدل به صورت یک سیستم تغییر ناپذیر با زمان مادامی که ترانزیستور روشن است، عمل میکند. مادامی که ترانزیستور خاموش است، مبدل به صورت سیستم تغییر ناپذیر با زمان دیگر عمل میکند و اگر جریان القاگر به صفر برسد، مبدل هنوز به صورت یک سیستم تغییر ناپذیر با زمان دیگر عمل می کند. اگر ترانزیستور کنترل شود، مبدل میتواند به صورت کلیدزنی بین سیستمهای تغییر ناپذیربا زمان مختلف در طول پریود کلید زنی توصیف شود. در نتیجه مبدل می تواند به صورت یک سیستم تغییر پذیر با زمان مدل شود. میانگین فضای حالت یک روش برای تقریب سیستم تغییر پذیر با زمان با یک سیستم تغییر ناپذیر با زمان خطی پیوسته با زمان میباشد. این روش از توصیف فضای حالت از سیستم تغییر ناپذیر با زمان به صورت یک نقطه آغازی استفاده میکند. این توصیف ها از فضای حالت سپس با توجه به مدتشان در پریود کلیدزنی میانگین میشوند.
مدل میانگین غیرخطی میشود و تغییر ناپذیر با زمان است و سیکلکاری دارد و به صورت سیگنال کنترل میباشد. این مدل نهایتاً در نقطه کار برای به دست آوردن یک مدل سیگنال کوچک خطی میشود. (جوهانسون، 2004)
جهت مشاهده و دانلود بررسی انواع پالس های قدرت و مدارات مولد آنها و مبدل بوک بوست کلیک کنید .
کنترل حالت جریان
جریان القاگر مبدل باک برای کنترل کننده جریان در حلقه درونی به کار می رود و ولتاژ خروجی برای کنترل کننده ولتاژ در حلقه خارجی به کار می رود. این روش کنترل ، کنترل حالت جریان نامیده میشود.
فرض میشود که حلقه خروجی ارائه نمیشود. آن گاه سیستم یک سیستم حلقه بسته میشود. چون جریان القاگر از عقب تغذیه می شود، اگر حلقه خروجی اضافه شود ،یک حلقه بسته جدید به دست آورده میشود. سیگنال کنترل از حلقه خروجی به صورت سیگنال مرجع برای کنترل کننده جریان عمل میکند. کنترل کننده جریان، جریان القاگر را کنترل میکندکه میتواند به صورت های مختلف ایجاد شود. یک راه کنترل کردن مقدار پیک از جریان القاگر در هر پریود کلیدزنی میباشد.
ریدلی (1991) و تان و میدلبروک (1995) دو مدل برای کنترل حالت جریان ارائه کردند.تفاوت اصلی بین دو مدل، مدلسازی از گین حلقه جریان میباشد. المظفر و حمد (1999) یافتند که حساسیتهای پیشگویی شده به وسیله دو مدل متفاوت میباشند. مقدار میانگین از جریان القاگر میتواند به جای مقدار پیک کنترل شود. این روش کنترل معمولاً کنترل حالت جریان میانگین نامیده میشود. (جوهانسون، 2004)
جهت مشاهده نمونه های دیگر از ادبیات و مبانی نظری مهندسی برق کلیک کنید.
محرک برای این کار
چند نکته باید در مورد مبدل در نظر بگیریم. یکی از این نکات، حفظ کردن ولتاژ خروجی در فاصله ولتاژ مشخص میباشد. بعضی از تغییراتی که میتواند تغییر ولتاژ خروجی را کاهش دهد به صورت زیرمیباشد:
– تغییر خواص بعضی عناصر در مبدل به طور مثال افزایش ظرفیت خازن
– تغییر توپولوژی مبدل
– تغییر برای یک کنترل کننده پیشرفته
– افزایش تعداد سیگنالهایی که اندازهگیری میشوند و استفاده به وسیله کنترل کننده
هر یک از تغییرات ضررهایی به صورت زیر دارد:
– قیمت بیشتر
– وزن افزایشی و حجم
– قابلیت اطمینان کمتر
– کارآیی کمتر
محرکها در مکان های عناصر و توپولوژیهای مبدل وکنترل کننده ها بررسی میشوند. برای به دست آوردن کنترل اجرای خوب از یک سیستم، یک مدل خوب از سیستم احتیاج میشود.
یک مدل از یک سیستم میتواند به وسیله استفاده قانونهای فیزیک و یا به وسیله استفاده اندازهگیریهای سیستم به طور مثال شناسایی سیستم (لجونگ 1999) نتیجه گرفته شود. هنگامی که سیستم در طول زمان تغییر میکند، یک مزیت برای به کار بردن شناسایی سیستم که میتواند روی خط برای آپدیت کردن مدل استفاده شود، دارد.اين مدل تنظیم شده، سپس برای تنظیم پارامترها از كنترل كننده استفاده میشود که ضرورت کنترل تطبیقی میباشد (آستروم و ویتنمارک 1995).
یک كنترل كننده تطبیقی میتواند بهتر از یک كنترل كننده غیر تطبیقی عمل کند. یک مشکل کنترل تطبیقی ايجاد شناسایی به صورتی که مدل در زمان یک تغییرسريع سیستم بدون شناسایی برای نویز اندازهگیری عمل میکند، میباشد.
مدلها برای مبدلهای dc به dc بدون کنترل کننده ها
تعدادی روش برای به دست آوردن یک مدل تغییر ناپذیر با زمان پیوسته خطی از یک مبدل dc- dc استفاده می شود. میانگین فضای حالت (میدلبروک و کاک (1976) و میچل (1988))میانگین مداری (وستر و میدلبروک (1973) و ورپرین (1990)) و رهیافت تزریق جریان (سلیکو و فسارد (1977) و کیسلوسکی و ریدل و سوکال ( 1991)) تعدادی از آن ها میباشد.
اگر این روشها برای یک مبدل که در حالت هدایت پیوسته کار میکند به کار روند، مدلهای نتیجه در فرکانسهای بالا و پایین دقیق میباشند .(در این جافرکانسها مرتبط به فاصله dc و نصف فرکانس اتصال هستند .به طور مثال فرکانس های بالا کمتر از نصف فرکانس اتصال می باشند.)
اما اگر این روشها برای یک مبدل که در حالت هدایت ناپیوسته کار میکند به کار روند، مدلهای نتیجه فقط در فرکانسهای پایین دقیق است. سان (2001) یک روش تغییر یافته برای به دست آوردن مدلها برای مبدلهایی که در حالت هدایت ناپیوسته کار میکنند، ارائه داد که در فرکانسهای بالا و پایین دقیق میباشند. تیمرسکی (1994 و 1991) از تئوری سیستم تغییر پذیر با زمان برای نتیجه گرفتن مدلها برای تابع فرکانس استفاده کرد و این مدلها برای همه فرکانسها به طور مثال بیشتر از نصف فرکانس اتصال مناسب می باشند. تابع فرکانس کنترل به خروجی در جایی که مبدل در حالت هدایت پیوسته یا حالت هدایت ناپیوسته کار میکند، نتیجه می شود.
هنگامی که در تابع فرکانس کنترل به خروجی از یک مبدل استفاده میشود، فرکانس فاصله dc به نصف فرکانس اتصال بیشتر از همه موارد جالب توجه می باشد. (جوهانسون، 2004)
مدلها برای کنترل حالت جریان
تعداد زیادی مدل زمان پیوسته برای کنترل حالت جریان در طول سالها ارائه شده است. بعضی از این مدلها برای دقیق بودن در فرکانس های بالا در نظر گرفته میشوند. مدلها ی ارائه شده به وسیله ریدلی (1991) تان و میدلبروک (1995) وتیمرسکی و لی (1993) برای دقیق بودن از dc به نصف فرکانس اتصال طراحی میشوند. تیمرسکی و لی (1993) یک مدل فضای حالت مادامی که مدلهای ریدلی و تان از مدل کلید PWM (ورپرین 1990) استفاده میکنند، ارائه کردند.
تیمرسکی (1994) یک مدل برای تابع فرکانس (از سیگنال کنترل به ولتاژ خروجی) نتیجه گرفت ( به طوری که برای همه فرکانسها مناسب می باشد.) تفاوت اصلی بین مدلهای ریدلی و تان، مدلسازی از گین حلقه جریان میباشد. گین حلقه جریان میتواند به وسیله استفاده از مدوله کننده دیجیتال (چو و لی 1984) یا یک تکنیک آنالوگ (تان و میدلبروک 1995) اندازهگیری شود اما نتایج یکسان نیستند. مادامی که مدلتان نتایج به دست آمده هنگامی که از تکنیک آنالوگ استفاده میشود را پیشگویی میکند،.
گین حلقه جریان در مدل ریدلی، نتایج اندازهگیری به دست آمده به وسیله استفاده از مدوله کننده دیجیتال را پیشگویی می کند. تکنیک آنالوگ در تان و میدلبروک (1995) ترجیح داده میشود. اما لو و کینگ (1999) ادعا داشتند که تکنیک آنالوگ برای اندازهگیری گین حلقه جریان صحیح نیست و یک مدوله کننده دیجیتال باید به جای آن استفاده شود. یک مدوله کننده دیجیتال میتواند یک تأخیر زیاد را برای مدوله کننده پهنای پالس اضافه کند.
مبدل باک
مبدل باک ولتاژ ورودی را کاهش می دهد. یک مبدل باک با آرایش فیلتر خروجیاش در شکل 3-1نشان داده می شود.
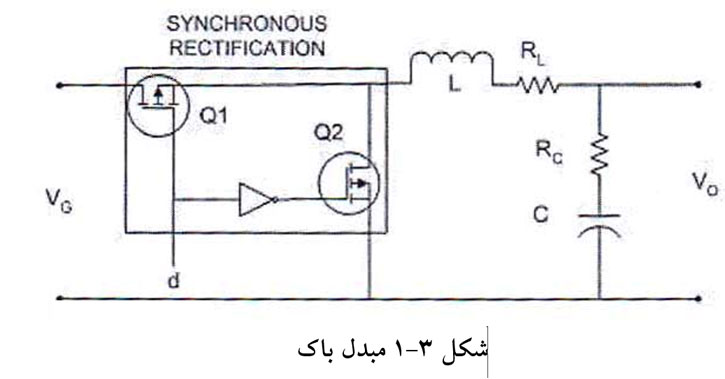
شکل 3-1 مبدل باک
(کاسات،2004)
هنگامی که ترانزیستور Q1 روشن میشود و Q2 خاموش میشود، ولتاژ ورودی در القاگر واردمیشود و جریان در القاگر به طور خطی افزایش مییابد.در همان دوره خازن شارژ میشود. هنگامی که ترانزیستور Q2 روشن میشود و Q1 خاموش میشود ،ولتاژ در القاگر معکوس میشود ولی جریان در القاگر نمیتواند به طور لحظهای تغییر یابد و جریان به طور خطی آغاز به کاهش میکند. در این دوره همچنین خازن با ذخیره انرژی در القاگر شارژ میشود. امکان دو حالت از عملکرد یعنی حالت های پیوسته و ناپیوسته وجود دارد. در حالت پیوسته، جریان القاگر هیچ وقت به صفر نمیرسد و در حالت ناپیوسته، جریان القاگر در یک دوره کلیدزنی به صفر میرسد. در جریانهای بار کمتر، مبدل در حالت ناپیوسته کار میکند. ولتاژ خروجی تنظیم شده در حالت ناپیوسته، یک رابطه خطی زیاد با ولتاژ ورودی به صورت عملکرد حالت هدایت پیوسته ندارد.
مبدل باک و مبدل بوست
نمونه ای از فهرست منابع جهت مطالعه بیشتر
- 1- رشید م. 1387. الکترونیک قدرت: مدارها- عناصر- کاربردها. ترجمه ا افجهای، م مهاجر. نوبت هشتم. تهران: نوپردازان، 688 صفحه.
- 2- موهان ن، آندلندت، رابینز و . 1391. الکترونیک قدرت: مبدلها- کاربردها- طراحی. ترجمه ج سلطانی، م رستگار فاطمی، ن ابجدی. نوبت اول. تهران: نیاز دانش، 351 صفحه.
- Ahmad A, Liu k, Kinoshita H. 2010. High performance algorithms for the control of buck dc-dc converters. International Journal of Engineering Science and Technology, 2(10): 5799-5812.
- Alargt F, Ashur A. 2013. Analysis and simulation of interleaved boost converter for automotive applications. International Journal of Engineering and Innovative Technology (IJEIT), 2: 76-82.
- Benyahia N, Denoun H, Badji A, Zaouia M, RekiouaT, Benamrouche N, Rekioua D. 2014. MPPT Controller for an interleaved boost dc-dc converter used in fuel cell electric vehicles. International Journal of Hydrogen Energy: 1-10.
- Chander S, Agarwal P, Gupta I. 2010. Design, modeling and simulation of dc-dc converter for low voltage applications. IEEE ICSET, Kandy, Srilanka, 6-9 Dec.
- Chonsatidjamroen S, Areerak K-N, Areerak K-L. 2011. Dynamic model of a buck converter with a sliding mode control. World Academy of Science, Engineering and Technology, 60: 288-293.
- Chudjuarjeen S, Jayasuriya S, Juan C, Jimenez, Chika O, Nwankpa, Miu K, Sangswang A. Simulation of a dc-dc boost converter with network models. Electrical and Computer Engineering Department Drexel University, Department of Electrical Engineering King Mongkut’s University of Technology Thonburi.
9- Gong S, Chen L, Yu C, Xie G. 2012. Modeling and simulation of non- ideal buck converter in dcm. International Journal of Computer Technology and Electronics Engineering (IJCTEE), 2: 72-75.
- Han S, Choi N, Rim C, Cho G. 1998. Modeling and analysis of static and dynamic characteristics for buck- type three- phase pwm rectifier by circuit dqtrans formation. IEEE Transaction son Power Electronics, 13: 323-336.
- Hasaneen B, Mohammed A. 2008. Design and Simulation of dc/dc boost converter. IEEE Faculty of Eng , Al-Azhar University, Faculty of Engineering, Minia University: 335-340.
- Husna A, Siraj S, Muin M. 2012. Modeling of dc-dc converter for solar energy system applications. IEEE Symposium on Computers & Informatics: 125-129.
- …
- …
| رشته | برق |
| گرایش | قدرت |
| تعداد صفحات | 52 صفحه |
| منبع فارسی | دارد |
| منبع لاتین | دارد |
| حجم | 250 kb |
| فرمت فایل | ورد (Word) |
| موارد استفاده | پایان نامه (جهت داشتن منبع معتبر داخلی و خارجی ) ، پروپوزال ، مقاله ، تحقیق |
نقد و بررسیها
هنوز بررسیای ثبت نشده است.
موارد مرتبط
نقد و بررسیها
هنوز بررسیای ثبت نشده است.