قیمت 19,000 تومان
استاتکام یا بهبود عملکرد دینامیکی و PLL
استاتکام و کنترل کننده حلقه قفل فاز و توپولوژیهای آن
مروری بر استاتکام و کنترل کننده حلقه قفل فاز و توپولوژیهای آن
2-1تعریف پایداری و علتهای کاربرد استاتکام و PLL ……………………………………………………………………….
2-1-1 پایداری ولتاژ ……………………………………………………………………………………………………………………..
2-1-2 پایداری دینامیکی …………………………………………………………………………………………………………………
2-1-3 پایداری استاتیکی ولتاژ ………………………………………………………………………………………………………….
2-1-4 ضعیف ترین باس …………………………………………………………………………………………………………………
2-1-5 جبرانساز استاتیکی توان راکتیو (SVC)……………………………………………………………………………………
2-1-5-1 مهمترین کاربردهای SVC ……………………………………………………………………………………………….
2-1-5-2 رایج ترین انواع SVC ………………………………………………………………………………………………….
2-1-6 جبرانساز استاتیکی سنکرون ((STATCOM…………………………………………………………………………..
2-1-6-1 مهمترین کاربردهای STATCOM …………………………………………………………………………………..
2-1-6-2 اصول عمليات STATCOM …………………………………………………………………………………………….
2-1-6-3 جایابی STATCOM دریک سیستم قدرت …………………………………………………………………………
2-1-6-4 مدلسازی STATCOM ………………………………………………………………………………………………..
2-1-6-5 انواع کنترل کننده در جبرانساز استاتیکی……………………………………………………………………………..
2-1-7 مقایسه STATCOM با SVC ……………………………………………………………………………………………..
2-1-8 توان راکتیو ………………………………………………………………………………………………………………………..
2-1-8-1 فرموله کردن مساله ………………………………………………………………………………………………………..
2-1-8-2 تابع هدف ………………………………………………………………………………………………………………………
2-1-8-3 محدودیتهای سیستم ……………………………………………………………………………………………………..
2-1-8-4 طرح کنترل توان راکتیو …………………………………………………………………………………………………….
2-1-9 بهبود عملکرد دینامیکی STATCOM با استفاده از اینورتر سه سطحی ………………………………………
2-1-9-1 اینورتر سه سطحی دیود کلمپ ………………………………………………………………………………………..
2-1-9-2 مدولاسیون پهنای پالس سینوسی ……………………………………………………………………………………
2-1-9-3 مدار کنترلی …………………………………………………………………………………………………………………….
2-1-10 تئوری PLL …………………………………………………………………………………………………………………….
2-1-10-1 روش حلقه قفل شده در فاز …………………………………………………………………………………………..
2-1-10-2 مقایسه مدلهای PLL …………………………………………………………………………………………………….
2-1-10-2 بررسی حلقه قفل شده فاز (PLL) برای بار نامتعادل ………………………………………………………..
2-1-10-3 معرفی حلقه قفل فاز برای کمیت های سه فاز…………………………………………………………………….
2-1-10-4 پاسخ PLL سهفاز تحت شرایط نامتعادلی ولتاژ ………………………………………………………………..
2-1-10-5 روش حذف تأثیر عدم تعادل
2-2 نحوه استفاده حلقه قفل فاز (PLL) در جبرانساز استاتیکی …………………………………………………………….
2-2-1 بررسی حلقه قفل فاز برای STATCOM بهمنظور افزایش پایداری سیستم قدرت………………………..
2-2-1-1 روش های کنترل STATCOM ………………………………………………………..……………….…………….
2-2-1-2 مبدل 24 پالسه و اساس کنترل STATCOM ……………………………………………………………………
2-2-1-3 عملکرد دینامیکی STATCOM ………………………………………………………………………………………..
2-2-1-4 تاثیر استحکام سیستم قدرت بر پایداری STATCOM ………………………………………………………………….
2-2-1-5 تاثیر PLL بر عملکرد STATCOM ………………………………………………………………………………….
2-2-2 قاعدهPLL ارائه شده …………………………………………………………………………………………………………
2-2-2-1 مشکلات متداول SRF-PLL …………………………………………………………………………………………….
2-2-2-3 جدا کردن مؤلفههای نامتعادل شده ……………………………………………………………………………………
2-2-2-4 الگوریتم فیلتر جابجایی متوسط ………………………………………………………………………………………..
2-2-2-5 شماتیک DSRF-PLL ارائه شده ………………………………………………………………………………………
2-2-2-7 کنترل STSTCOM با PLL ……………………………………………………………………………………………..
منابع
تعریف پایداری و علتهای کاربرد استاتکام و PLL

پایداری ولتاژ
پایداری ولتاژ اشاره دارد به توانایی سیستم قدرت در نگهداری ولتاژ تمامی باسها در محدوده قابل قبول، که این توانایی باید در شرایط عملکرد عادی سیستم و پس از حادث شدن اغتشاش باشد. سیستم زمانی دچار ناپایداری ولتاژ میشود که تقاضای بار بهطور ناگهانی افزایش یابد و یا اینکه شرایطی در سیستم بهوجود آید که ولتاژ باسها بهطور تصاعدی و غیر قابل کنترلی شروع به افت کنند. یکی از عوامل مهمی که در ناپایداری ولتاژ نقش بسزایی ایفا میکند، ناتوانی سیستم در تامین توان راکتیو مورد نیاز است. ناپایداری ولتاژ سبب فروپاشی ولتاژ (Voltage Collapse) میشود، بهطوریکه آنقدر ولتاژ افت میکند که سیستم دیگر قادر به بازیابی آن نیست [1].
پایداری دینامیکی
پایداری دینامیکی اشاره دارد به پایداری سیستم قدرت برابر اغتشاشات ناگهانی ولی کوچک بهطوریکه سیستم با معادلات دیفرانسیلی خطی توصیف میشود و سیستم میتواند به کمک کنترلرهای پایدارساز، پایداری خود را حفظ کند. مثالهای نوعی عبارتند از نوسانات فرکانس پایین شبکه ناشی از بههم پیوستن سیستم قدرت پیوسته، و یا نوسانات پیچشی نیروگاه حرارتی بخاطر رزونانس زیر سنکرون ناشی از نصب خازنهای سری جبرانساز در خطوط [1].
جهت مشاهده و دانلود ماشین سنکرون (معرفی ، معادلات و مدل های ماشین سنکرون) کلیک کنید .
جهت مشاهده و دانلود ماشين سنكرون و سيستم تحريک استاتيک ژنراتورسنکرون و انواع اكسايتر کلیک کنید .
پایداری استاتیکی ولتاژ
پایداری سیستم قدرت طبق تعریف عبارت است از توانایی سیستم قدرت در حفظ حالت تعادل در شرایط بهره برداری عادی سیستم و یافتن نقطه کار متعادل جدید پس از حادث شدن اغتشاش در آن. پایداری استاتیکی به پایداری سیستم قدرت در اثر تغیرات کوچک و پیوسته در بار و شرایط اولیه بار و باقی ماندن پایداری سیستم با وجود سیستمهای تحریک و گاورنرهای مرسوم میباشد.
پایداری استاتیکی ولتاژ بهطور عمده در ارتباط با عدم توازن توان راکتیو میباشد. در نتیجه توانایی بار در یک باس سیستم بستگی به پشتیبانی توان راکتیوی دارد که باس میتواند از سیستم دریافت کند. بنابراین پشتیبانی توان راکتیو باید در محلی مناسب صورت گیرد. باید دقت نمود که گسترش آرام تغییرات موجب کمبود برق و کاهش ولتاژ خواهد شد.
هنگامی که توان انتقالی افزایش مییابد ولتاژ در پایانه دریافت کاهش یافته و در نهایت یک نقطه بحرانی، نقطهای که در آن سیستم از توان راکتیو استفاده نمیکند حاصل میشود که هرگونه افزایش توان راکتیو منتقل شده منجر به کاهش سریع ولتاژ خواهد شد. تنها راه نجات سیستم برای جلوگیری از فرپاشی ولتاژ، کاهش بار توان راکتیو یا اضافه کردن توان قبل از رسیدن به نقطه فروپاشی ولتاژ است [2].
برای بهبود پایداری استاتیکی میتوان اقدامات زیر را انجام داد؛
- افزایش سطح ولتاژ شبکه
- اضافه نمودن خطوط جدید به سیستم انتقال
- کاهش راکتانس سری خط با باندل کردن خطوط
- نصب خازنهای سری در خطوط انتقال و کاهش راکتانس سری ترانسفورماتورها
PLL
جهت مشاهده نمونه های دیگر از مبانی نظری و ادبیات مهندسی برق کلیک کنید.
جبرانساز استاتیکی توان راکتیو (SVC)
جبرانساز SVC را میتوان از اولین نسل جبرانسازهای پیشرفته دانست که در اولین دهه هفتاد میلادی معرفی شد. این جبرانسازها بصورت موازی به نقطهای که قرار است عمل جبرانسازی انجام شود متصل میشوند. SVC اساسا یک تولیدکننده یا مصرفکننده توام راکتیو ایستایی است که بصورت موازی متصل شده و خروجی آن برای تغییر جریان کاپاسیتیو یا اندکتیو تنظیم شده، بهگونهای که متغیرهای سیستم قدرت حفظ و یا کنترل شوند. متغیر کنترل شده عموما ولتاژ باس SVC است.
این تجهیز بهعنوان وسیلهای جهت بهبود کیفیت توان پیامدی از فشار اقتصادی بر سیستم انرژی الکتریکی در سراسر دنیا است بنابراین درک صحیح ساختار و عملکرد کنترلی و رفتار دینامیکی آن بسیار مهم است [3].
مهمترین کاربرد های SVC
- تثبیت ولتاژ در شبکههای ضعیف
- کاهش تلفات انتقال
- افزایش ظرفیت انتقال توان
- افزایش میرایی اغتشاشات کوچک
- بهبود پایداری ولتاژ
- حذف نوسانات توان
رایجترین انواع SVC
رایجترین انواع SVC با توجه به عناصر بهکار رفته در ساختمان آنها به شرح زیر است:
- راکتور کنترل تریستوری TCR
- خازن سوییچ تریستوری TSC
- راکتور سوییچ تریستوری TSR
خازن سوییچ مکانیکی MSC
تئوری PLL
یک حلقه قفل فاز یا حلقه قفل شده در فاز (PLL) یک سیستم کنترلی الکترونیکی است، که یک سیگنال قفل شده فاز متناسب با ورودی یا مرجع میسازد. PLL در یک فیدبک منفی مشترک توسط مقایسه خروجی “اسیلاتور کنترل شونده با ولتاژ (VCO)[1] “و ورودی فرکانس مرجع، با آشکارساز فاز، انجام میپذیرد. آشکارساز فاز برای هدایت فاز اسیلاتور، به سیگنال مرجع ورودی استفاده میشود [17].
مکانیزمهای حلقه با فاز قفل شونده میتواند بهعنوان مدارهای آنالوگ یا دیجیتالی اجرا شود. هر دو از این اجراها، ساختار پایهای یکسانی را بهکار میبرند.
هر دو مدار PLL آنالوگ و دیجیتال سه قسمت اصلی دارند :
- یک آشکارساز فاز
- یک اسیلاتور الکترونیکی متغیر
- یک مسیر فیدبک ( اغلب شامل یک تقسیم کننده فرکانس)
بهبود عملکرد دینامیکی STATCOM با استفاده از اینورتر سه سطحی
کنترل و جبرانسازی توان راکتیو یکی از ضروریترین قسمتها در طراحی و بهرهبرداری از سیستم قدرت است. چراکه عدم تعادل توان راکتیو در یک سیستم منجر به بالا رفتن تلفات سیستم، کاهش ظرفیت انتقال توان، ناپایداری در سیستم و برهم خوردن پروفیل ولتاژ میشود. پیشرفت قطعات نیمههادی در چند دهه اخیر باعث شده تا استفاده از مبدلهای منبع ولتاژ بهعنوان جایگزینی برای کنترل کنندههای توان راکتیو معمول (نظیر خازنسوییچ شده باتریستور و یا راکتور کنترلشده با تریستور) مورد توجه قرار گیرد [15].
مقایسه مدلهای PLL
طرح حلقه قفل فاز (PLL) مدت زیادیست که شناخته شده، برای تولید سیگنال کنترل از مبدلهای کنترل فاز تریستوری بر روی سیستم با تحریف امواج ولتاژ خط استفاده میشود. کاورا و بلاسکو طرحی از PLL پیشنهاد دادند که بردار واحد را از امواج ولتاژ سه فاز تولید میکنند. PLL با پایه SRF[1]، از استانداردهای متناسب انگرال (PI) در کنترل حلقه استفاده میکنند. این طرح در شرایط اختلال هم بهدرستی عمل میکند، مانند اعوجاج هارمونیک، ولتاژ نامتوازن، اختلاف فرکانس و غیره. با این حال، سرعت پاسخ آن تقریبا کند است و دادههای PLL خالی از اشتباه نیست. یک ساختار PLL مشابه در [19] و [20] پیشنهاد شده که بر اساس تئوری توان لحظهای است، که همان محدودیت های قبلی را دارد. الگوریتم های دیگری برای SRF-PLL [2] در [21] و [22] پیشنهاد شده است. که بهدلیل کنترل PIهمان عکسالعمل پویای کند معمول را دارند.
الگوریتم PLL مورد بحث SRF-PLL تعدیل شده نام دارد زیرا تنها از یک فاز ولتاژ استفاده میکند بهجای اینکه از ولتاژ سه فاز مانند نمونه های قبلی استفاده کند. علاوه بر این کنترل PI در آن حذف شده است. مفهوم MSRF-PLL [3] معمولی جدید نیست بلکه اولین بار از آن در فیلترهای هارمونیک اکتیو برای سرکوب کردن توالی جریان هارمونیک صفر استفاده شد و سپس گسترش یافت، که سیستمی سه فاز و چهار سیمه بود، پس از آن در یک سیستم سه فاز مشابه استفاده شد که در آن فیلتر اکتیو سری MSRF-PLL در یک سیم خنثی قرار داده شده و توالی جریان هارمونیک صفر را کنترل میکند. از نظر عکس العمل پویا، بار محاسباتی و خطای زاویه فاز مقایسه کوتاهی ما بین PLLپیشنهاد شده و سه الگوریتم PLL تک فاز در زیر ذکر شده است.
اولین PLLبر اساس نیروی الکتریکی ساخته شده است که به آن PPLL) [4] ) گویند و دارای کنترل کننده PI بههمراه یک فیلتر پایین گذر میباشد. در MSRF-PLL فرکانس قطع جریان فیلترIIR و ترتیب آنها تنها پارامترهای مورد نیاز هستند، فرکانس قطع جریان باید پایینتر از پایینترین فرکانس حاضر در جریان باشد برای مثال .
دومین اگوریتم بر اساس معکوس تبدیل پارک(ParkPLL[5]) است، که یک ورژن تک فاز از SRF-PLL سه فاز میباشد. و تلاش میکند سیستم سه فاز متعادل با یک سیگنال ولتاژ ورودی، و پس از آن از ساختار PLL سه فاز تقلید کند. همانطور که در [21] و [22] نشان داده شد، MSRF-PLL یک ورژن تک فاز از SRF-PLL نیست. MSRF-PLL از ساختار خودش استفاده میکند. که بر اساس مفهوم یک تک فاز SRF است. در اینجا مشخصاتی مانند ردیابی و اختلال را نمیتوان جبران کرد، برای همین بهParkPLL و PPLL نیاز مندیم.
الگوریتم سوم بر پایه طرح تشخیص فاز منطبق است، که به آن PLL پیشرفته یا EPLL[6] میگویند. اساسا اجزاء اساسی سیگنال ورودی را در زمان واقعی با برآورد دامنه آن، فاز و فرکانس بازسازی میکند. این الگوریتم همانطور که در ParkPLL نشان داده شده، باید با یک معاوظه بین سرعت و عکس العمل و ردیابی اجزای هارمونیک مواجه شود. در MSRF-PLL پیشنهاد شده، سرعت عکسالعمل و ردیابی هارمونیکها مستقل از هم هستند.
[1] Synchronous Reference Frame
[2] Synchrronous Reference Frame-Phase Locked Loop
[3] Modified Synchrronous Reference Frame-Phase Locked Loop
[4] Power-based Phase Locked Loop
[5] Park Transformation Phase Locked Loop
[6] Enhanced Phase Looked Loop
روش های کنترل STATCOM
برای کنترل میزان توان راکتیو مبادله شده بین بار و STATCOM بایستی اندازه ولتاژ خروجی STATCOM کنترل شود. دو روش اصلی برای کنترل این ولتاژ خروجی وجود دارد ؛ روش مستقیم و روش غیر مستقیم.
در روش مستقیم، ولتاژ خازن dc ثابت بوده و ولتاژ خروجی مستقیما با تغییر زمانهای کلیدزنی کلیدهای قدرت، تغییر داده میشود. عموما این عمل با مدولاسون عرض باند ((PWM[1] انجام میشود. بههمین جهت روش کنترل مستقیم را روش PWM نیز میگویند. در روش غیر مستقیم، تغییری در زمان کلیدزنیها اعمال نمیشود و اندازه خروجی با تغییر زمان ولتاژ خازن dc انجام میشود. برای تغییر ولتاژ خازنdc بایستی آن را شارژ یا دشارژ کرد، که در این عمل توسط ایجاد “تغییر فاز موقتی” بین ولتاژ خروجی STATCOM و ولتاژ خط انجام میشود. بدین ترتیب، توان اکتیو بین STATCOM و خط مبادله شده و در نتیجه باعث شارژ و دشارژ شدن خازن dc میشود. به همین جهت روش کنترل غیرمستقیم را روش کنترل فاز نیز میگویند [25].
[1] Pulse Width Modulation
روش حلقه قفل شده در فاز
حلقه قفل شده در فاز یک حلقه فیدبک است که دو سیگنال را در یک فرکانس یکسان با مقداری اختلاف فاز قفل میکند. بلوک دیاگرام حلقه قفل شده در فاز مطابق شکل (2-16) است [17].
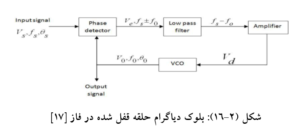
عملکرد حلقه قفل شده در فاز به این صورت است که اگر فرکانس دو سیگنال ورودی به آشکارساز فاز متفاوت باشد خروجی آشکارساز فاز بهگونهای تغییر میکند تا ورودی اسیلاتور کنترل شده با ولتاژ VCO را بهگونهای تنظیم کند تا فرکانس خروجی برابر فرکانس ورودی شود. اگرچه قفل شدن این حلقه یک فرایند غیرخطی است اما میتوان با یک مدل تقریبی خطی روابط ریاضی ساده برای اجزای آن پیدا کرد.
برای یک شبکه سه فاز نیز میتوان یک حلقه قفل شده در فاز طراحی کرد که از ولتاژ هر سه فاز برای تخمین فرکانس استفاده کند. در شکل (2-17) یک حلقه قفل فاز برای سیستم سهفاز ارائه شده است [18].
نمونه ای از منابع جهت مطالعه بیشتر
- Dogan M, Kenan Dosoglu M, Maden D, Tosun S. 2011. Investigation of the Best Placement for Voltage Stability by STATCOM. Electrical and Electronics Engineering (ELECO), 2011 7th: 117-121
- You-jie Ma, Jin-hua L, Xue-song Z, Hu-long W. 2011. The Static Bifurcation Analysis of STATCOM on Power System Voltage Stability. Measuring Technology and Mechatronics Automation (ICMTMA), 2011 Third International Conference on, 10.1109/ICMTMA.2011.810 : 953-957.
- Chamia M, Dafgard A, Frank H, Angquist L. 2008. Impact of Present and Future Technologies on Design of SVC Substations. GIGRE, August 26-September 1,2008,Paper No 23-201.
- هینگورانی ن، گایوگی ل. بهار 1384. آشنایی با FACTS.ترجه ا فریدون درافشان، چاپ اول، تهران: مهندسین مشاور قدس نیرو، 459.
- Hochgraf C, Lasseter R.H.2010. Statcom Controls for Operation With Unbalanced Voltages. Power Delivery, IEEE Transactions on:Volume: 13, Issue 2, April 2010 Page:538 – 544.
- Laka A, Croaa A, Barrena J. 2013. VSC topology comparison for STATCOM application under unbalanced conditions. Power Electronics and Applications (EPE), 2013 15th European Conference on.10.1109/EPE.2013.6631827.
- Erinmaz A. Static Var Compensator. 1986. Working Group 38-01,Task Force No.2 on SVC, GIGRE1986.
- Ali M, Fozdar M, Niazi K.R. 2012. Effect of STATCOM placement on performance of voltage sag mitigation. Power and Energy Society General Meeting, 2012 IEEE. 10.1109/PESMG.2012.6345232. page(s):1-7.
- Aihong T, Fang G, Furong L, Desheng J. 2011. Mathematical Model of STATCOM Based on Switched System. Power and Energy Engineering Conference (APPEEC), 2011 Asia-Pacific.DOL: 10.1109/APPEEC.2011.578552 : Page(s):1-4.
- Roa P, Crow M.L, Zhiping Y. 2013. STATCOM control for power system voltage control applications. Power Delivery, IEEE Transactions on Issue:4. DOl:10.1109/61.891520. page(s): 1311-1317.
- Jamali S, Kazemi A, Shateri H. 2008. Comparing effects of SVC and STATCOM on distance relay tripping characteristic. Industrial Electronics, 2008. ISIE 2008. IEEE International Symposium on. DOl: 10.1109/ISIE.2008.4676914. page(s): 1568-1573.
- Lijie D, Yang L, Yiqun M. 2010. Comparison of High Capacity SVC and STATCOM in Real Power Grid. Intelligent Computation Technology and Automation (ICICTA), 2010 International Conference on. DOl:10.1109/ICICTA2010.586. Page(s): 993-997.
- …
- …
| رشته | برق |
| گرایش | قدرت |
| تعداد صفحات | 57 صفحه |
| منبع فارسی | دارد |
| منبع لاتین | دارد |
| حجم | 1.4 MB |
| فرمت فایل | ورد (Word) |
| موارد استفاده | پایان نامه (جهت داشتن منبع معتبر داخلی و خارجی ) ، پروپوزال ، مقاله ، تحقیق |
نقد و بررسیها
هنوز بررسیای ثبت نشده است.
موارد مرتبط


نقد و بررسیها
هنوز بررسیای ثبت نشده است.