 تحت تاثیر بار ضربه ای")
قیمت 19,000 تومان
تحلیل دینامیکی سکوی پایه کششی
پایاننامه برای دریافت درجه کارشناسی ارشد رشتهی مهندسی عمران گرایش سازه های دریائی
عنوان پایاننامه: پایان نامه تحلیل دینامیکی سکوی پایه کششی تحت تاثیر بار ضربه ای
نگارش: سبحان سجودی
فهرست مطالب
فهرست جدولها نه
فهرست شکلها ده
1 فصل اول: مقدمه. 1
1-1 دلایل بررسی و هدف کلی پایاننامه. 1
1-2 مروری بر تاریخچه فعالیتهای انجام شده. 3
2 فصل دوم: مختصری بر سکوی پایه کششی .. 8
2-1 مقدمه. 8
2-2 سکوی پایه کششی : 9
2-2-1 بدنه سکو: 12
2-2-2 تجهیزات روی عرشه : 12
2-2-3 پایه های کششی: 12
2-2-4 رایزرها: 12
2-2-5 فونداسیون سکو: 13
2-2-6 مزایای سکوی پایه کششی : 13
2-2-7 سکوهای TLP نصب شده در سراسر دنیا: 14
3 فصل سوم: نیروهای اعمالی به سکو. 16
3-1 مقدمه. 16
3-2 نیروهای ناشی از امواج.. 16
3-2-1 معادلۀ موریسون برای اعضای قائم.. 17
3-2-2 معادله موریسن با حضور نیروی ناشی از جریان.. 20
3-2-3 ضرایب هیدرودینامیکی.. 20
3-2-4 سینماتیک ذرات موج.. 21
3-3 بارهای ضربه ای.. 21
3-3-1 بار ضربه ای مستطیلی.. 22
3-3-2 بار ضربه ای نیم سینوسی.. 22
3-3-3 بار ضربه ای مثلثی.. 23
3-3-4 بار ضربه ای نیم مثلثی.. 24
4 فصل چهارم: تحلیل دینامیکی سکوی پایه کششی . 25
4-1 مقدمه. 25
4-2 هندسه ی سکو. 26
4-3 ماتریس جرم. 27
4-3-1 ماتریس جرم فیزیکی.. 27
4-3-2 ماتریس جرم اضافی سکو: 28
4-4 ماتریس سختی سکو. 35
4-5 ماتریس میرائی.. 45
4-6 بردار نیرو. 46
4-6-1 محاسبه نیروهای ناشی از موج با استفاده از تئوری خطی.. 47
4-6-2 اثرات غیر خطی نوسان سطح آزاد: 54
4-6-3 محاسبه نیروهای ناشی از موج با استفاده از تئوری غیرخطی استوکس مرتبه پنجم.. 54
4-7 روش حل معادلات حرکت… 55
منابع سکوی پایه کششی
پایان نامه تحلیل دینامیکی سکوی پایه کششی تحت تاثیر بار ضربه ای 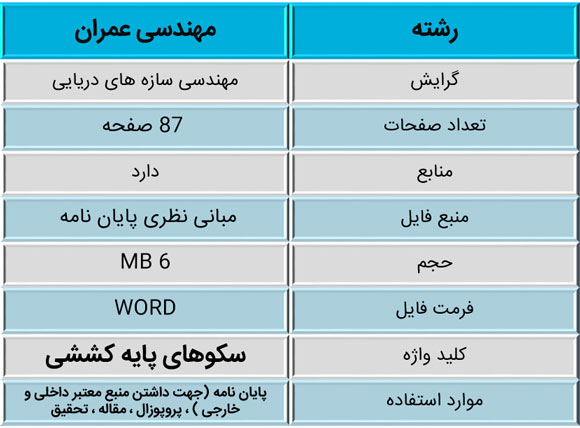
مختصری بر سکوهای پایه کششی
1-1 مقدمه
سكوهاي دريايي به سه دسته سكوهاي ثابت و سكوهاي شناور و سكوهاي تطبيقي تقسيمبندي مي شوند كه هركدام بر حسب شرايط آب وهوايي و عمق آب داراي انواع گوناگوني ميباشند.
سکوهای ثابت، همان طور که از نامشان پیداست، در تمام درجات آزادی تقریباً مقید بوده و دارای حرکات بسیار محدودی می باشند. این سکوها تا کف دریا کشیده شده و از طریق وزن خود یا شمع های کوبیده شده در خاک، ثابت می شوند. این نوع سکوها براي مناطقي با عمق آب كم تا متوسط مناسب می باشند. از انواع متداول سكوهاي دريايي ثابت، سكوهاي شابلوني، سكوهاي وزني و سکوهای خود بالابر[1] را میتوان نام برد.
در مناطقي كه عمق آب زياد باشد به دلايل اجرايي و اقتصادي كاربرد سكوهاي ثابت مقرون به صرفه نيست و انواع ديگري از سكوها مطرح ميشوند. يك دسته از اين سكوها، سكوهاي شناور مي باشند. سکو های شناور نسبت به نیروهای خارجی پاسخ بیشتری در درجات آزادی مختلف از خود نشان می دهند. این نوع از سکوها دارای بدنه ای شناور بوده و حرکاتشان بوسیله سیستم مهاری که به کف دریا متصل می شود، کنترل می شوند. از انواع متداول سكوهاي شناور و متحرک میتوان نيمه مغروقها[2]، کشتیهای تولید، ذخیره و تخلیه بار[3] را نام برد.
در مناطق با عمق آب زياد، دسته ديگري از سكوها كه به سكوهاي تطبيقي مشهورند مطرح ميباشند. رفتار اين سكوها در برابر نيروهاي عمودي شبيه سكوهاي ثابت بوده ولي در برابر نيروهاي جانبي داراي رفتاری شبيه سكوهاي شناور مي باشند.
لازم به ذکر است که درآب عمیق يكي از محدوديتهاي كاربرد سكوهاي ثابت مشكل بودن عمليات شمعكوبي يا اجراي پيهاي وزني و قطور شدن المانهاي سازهاي مورد استفاده در اين شرايط است كه با كاربرد پيهاي انعطافپذير يا مفصلي در سكوهاي تطبيقي اين مشكل برطرف ميشود و اين مورد يك مزيت بزرگ اين سكوها نسبت به انواع ديگر سكوها ميباشد. اين سكوها داراي انواع مختلفي بوده كه از انواع مرسوم آن ميتوان به سکوهای پایه کششی ((TLP، سكوهاي برجي مهار شده[4] و سكوهاي برجي مفصلي[5] اشاره كرد [19,20].
سکوی پایه کششی :
درحقیقت سکوی پایه کششی یا TLP یک سازه دوگانه[6] میباشد که نسبت به حرکات افقی، دارای قابلیت حرکت بوده و مانند یک سازه شناور عمل می نماید، در حالیکه نسبت به درجات آزادی قائم دارای سختی زیادی بوده و دامنه حرکت بسیار کمی در راستای عمودی دارد.
سکوی سکوی پایه کششی یا TLP از نظر هندسی شبیه سکوی نیمه مغروق است، با این تفاوت که بوسیله آرایه ای ازمهارهای قائم که در زیر پایه های سکو وصل می شوند به بستر دریا متصل شده است. بدلیل اینکه در این سکو نیروی شناوری از نیروی وزن بزرگتر است مهارهای قائم یا تندون ها همواره در حالت کشش قرار دارند و به این صورت سکو همانند یک آونگ معکوس عمل می کند. در موقع نصب، با مغروق کردن مخازن آب تعادل (ballast tanks) سیستم مهارهای قائم به زیر پایه ها متصل شده و سپس با تخلیه این مخازن (deballasting) نیروی وزن سکو کاهش می یابد در حالیکه بدلیل مهار سکو به بستر دریا امکان جابجایی سکو در راستای قائم و کاهش نیروی شناوری وجود ندارد در نتیجه مهارهای قائم همواره تحت کشش می مانند.
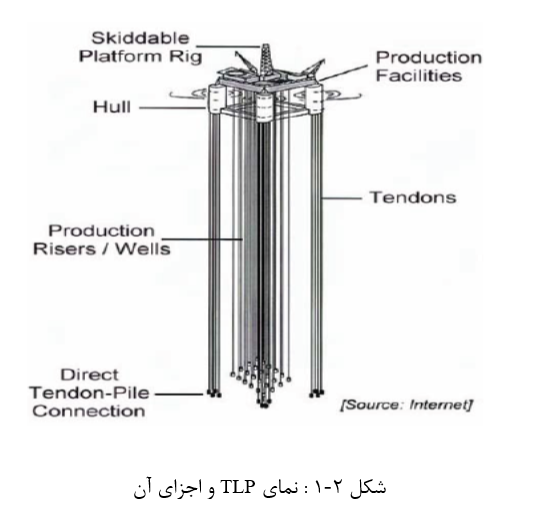
در سال 1984، کمپانی کونوکو[1] اولین سکوی پایه کششی را در حوزه نفتی هوتُن[2] واقع در دریای شمال نصب نمود. موفقیت این نوع سکوها باعث گردیده است که برای بسیاری از حوزه های نفتی جدید نیز این نوع سکو در نظر گرفته شوند [19,20]. شکل 2‑1 نمای TLP و اجزای آن مشاهده میشود.
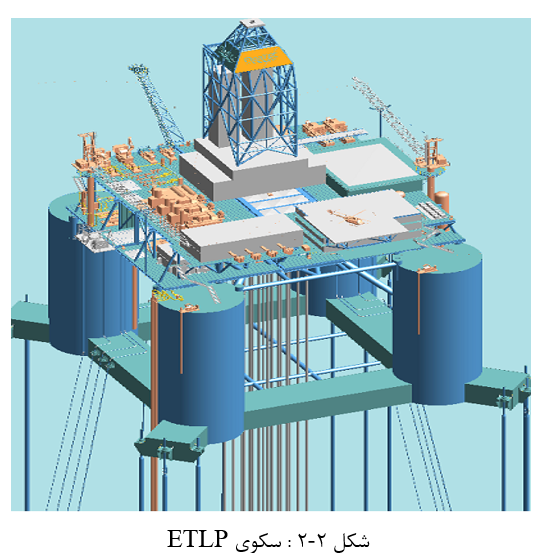
یک نوع جدید از سکوی پایه کششی، سکوی پایه کششی توسعه یافته[3] می باشد که به طور خلاصه به آن ETLP می گویند. در این نوع سکو ستون ها نسبت به حالت معمول در فاصله ی کمتری از هم قرار دارند. پانتون ها نیز تا طول مشخصی به حالت طره ای ادامه می یابند. با این کار بازوی لنگر مناسبی برای تندون ها ی متصل به آن ها بوجود می آید و حرکات قائم سکو محدود تر می شوند. سکوی ETLP برای اولین بار در سال 2003 توسط شرکت اگزون موبایل[4] در حوضه ی نفتی کیزومبا[5] ساخته شد. [21] یک نمونه از این سکو در شکل 2‑2 نشان داده شده است.
سکوهای سی استار[1] و موسز[2] هم از انواع دیگر سکوی پایه کششی می باشند که ویژگی برجسته ی آنها راحتی ساخت و اجرای آن ها می باشد.
سی استار یک نوع سکوی پایه کششی کوچک مقیاس می باشد که تنها یک ستون دارد. مقطع این ستون در نزدیکی سطح آزاد دریا کاهش یافته تا بارسطحی وارد بر سازه کاهش یابد. در بخش مغروق سکو و در انتهای بدنه ی آن، سه پانتون با آرایش مثلثی قرار می گیرند. لوله های مهاری به قسمت انتهایی این اعضا متصل می شوند. بدنه سکو نیز نیروی شناوری لازم را برای تحمل وزن عرشه و تجهیزات روی آن ایجاد می کند. سکوی سی استار برای اولین بار در سال 1998 توسط شرکت إنی[3] در خلیج مکزیک ساخته شد [21]. در شکل 2‑3 نمونه ای از سکوی موسز نشان داده شده است.
سکوی موسز هم از انواع سکوی پایه کششی کوچک مقیاس است. عرشه سکو توسط چهار ستون نزدیک به هم که در انتها با پانتون هایی متصل به هم می باشند، نگه داری می شود. پانتون ها نیز تا اندازه ی مشخصی امتداد یافته و تندون ها به آن ها متصل می شوند. با این کار بازوی لنگر بیشتری تولید شده و سختی افزایش می یابد. علاوه بر این با این کار از میزان پیش کشیدگی هر یک از تندون ها کاسته می شود. سکوی موسز برای اولین بار در سال 2001 میلادی توسط شرکت پالم انرژی آفشور[4] در خلیج مکزیک ساخته شد [21]. در شکل 2‑3 نمونه ای از سکوی موسز نشان داده شده است. [22]
مزایای سکوی پایه کششی:
سکوی TLP از پرکار بردترین سکوهای آب عمیق می باشد. در زیر به مهمترین مزیت های این سکو اشاره شده است:
- از آنجایی که این سکو طبیعتی دارد که می تواند خود را با محیط تطبیق دهد، از طرف بار موج ضربه کمتری را جذب می کند، به همین دلیل از این سازه می توان در شرایط بد و طوفانی دریایی استفاده کرد.
- فرکانس طبیعی در درجات آزادی اصلی(surge، sway و yaw) پایین تر از فرکانس موج غالب می باشد و احتمال وقوع پدیده تشدید کاهش می یابد و به همین دلیل نیروی وارد بر مهارها کمتر می شود.
- در آب های عمیق ، این سکو نسبت به سکوهای ثابت اقتصادی تر است.
- شیب منحنی هزینه نسبت به عمق برای سکوی پایه کششی نسبت به دیگر سازه های شناور، کمتر می باشد، زیرا با افزایش عمق فقط هزینه ی سیستم مهاری ونصب آن برای این سکو، افزایش می یابد.
- در مناطق زلزله خیز، این سکو در مقایسه با سازه های ثابت، بسیار ایمن تر است.
- محدود شدن حرکت قائم این سکو، در دوام و همچنین نظارت و نگهداری رایزرها، چاهای نفت و مهارها بسیار موثر است.
- این سکو توان انتقال هر رزونانسی را به خارج از محدوده فرکانسی ، در منطقه ای که انرژی موج حداکثر می باشد، دارد.
مطابق با شرایط محل، این سکو به آسانی منتقل، پیاده و نصب میشود و زمانی که عمق آب افزایش یابد، تنها کافیست طول مهارها را زیاد کنیم
جهت مشاهده نمونه های دیگر از ادبیات ، پیشینه تحقیق و مبانی نظری پایان نامه های مهندسی عمران کلیک کنید.
نمونه ای از منابع لاتین سکوی پایه کششی
| S.K. Chakrabarti, Hydrodynamics of offshore structures., computational mechanics publications, Inc., 1987. |
| M.H. Patel, Dynamics of Offshore Structures. London, Butterworths, 1989. |
| B. Natvig and P. and teigen, Natvig, B., and Teigen, P., Offshore and Polar Engrs., Vol. 13, pp. 3(4). 241-249, 1993. |
| R.A. Khan, N.A. Siddiqui, S.Q.A. Naquvi, and Ahmad, “Reliability assessment of TLP tethers under impulsive loading.,” in 3rd Indian National Conference on Harbour and Ocean Engineering, vol. 20, India, 2004, pp. 283–290. |
| J.R. Paulling and E.E. Horton, “Analysis of the tension leg stable platform.,” in Offshore Technology Conference, OTC No. 1263, vol. 6, 1970, pp. 379–390. |
| D.C. Angelides, C. Chen, and S.A. Will, Dynamic response of tension leg, BOSS, pp. 100-120, 1982. |
| G.J. Lyons, M.H. Patel, and S. Sarohia, “Theory and model test data for tether forces on tensionedbuoyant platforms,” in Offshore Technology Conference, OTC No. 4643, 1983. |
| P.S. Teigen, “The response of a tension leg platform in short-crested waves,” in Offshore Technology Conference, OTC No. 4642, 1983, pp. 525–532. |
| J.R. Morgan and D. Malaeb, “Dynamic analysis of tension leg platforms,” in Second International Conference of Offshore Mechanics and Arctic Engineering, Houston, 1983, pp. 31–37. |
| S.K. Chakrabarti, Non-linear Method in Offshore Engineering. The Netherlands, Elsevier Science Publisher, 1990. |
| D. Armenis, T. Angelopoulos, and D. and papanikas, “Time domain simulation of the dynamic behavior of a tension leg platform.,” in 1st Int. Offshore and Polar Engrg, 1991, pp. 100-10
…. ….. |
نقد و بررسیها
هنوز بررسیای ثبت نشده است.
موارد مرتبط
نقد و بررسیها
هنوز بررسیای ثبت نشده است.