")
قیمت 19,000 تومان
معرفی ، معادلات و مدل های ماشین سنکرون
ماشین سنکرون
معرفی ماشین سنکرون ، معادلات ماشین سنکرون و مدل های ماشین سنکرون
1 مقدمه ای از ماشین سنکرون ..
1.1 مقدمه:
2 معادلات دینامیکی ماشین سنکرون ..
2.1 معادلات ولتاژدرمتغیرهای ماشین:
2.2 معادلهی گشتاوردرمتغیرهای ماشین:
2.3 معادلات ولتاژدرمتغیرهای دستگاه مرجع روتور- معادلات پارک:
2.4 سیستم پریونیت:
2.5 معادلات خطی شدهی ماشین سنکرون
6 فصل ششم:مدل های ماشین سنکرون..
مدلهای ماشین سنکرون :
6.1 مدلهای مختلف ماشین سنکرون :
6.2 کاربردمدلهای مختلف:
6.3 تحلیل مدلهای ماشین سنکرون برای تعیین پارامترهای اساسی:
6.3.1 مدل(2.1).
6.3.2 مدل(0.0).
6.3.3 مدارمعادل مدل(0.0).
6.3.4 معادلات مداری مدل(0.0).
6.3.5 مدل(2.2).
6.3.6 مدارمعادل مدل(2.2).
6.3.7 معادلات مداری مدل(2.2)

ماشین سنکرون
ماشین سنکرون
مقدمه:
در یک ژنراتور سنکرون یک جریان dc به سیمپیچ رتور اعمال میگردد تا یک میدان مغناطیسی تولید شود. سپس روتور مربوط به ژنراتور بهوسیله یک محرک اصلی چرخانده میشود، تا یک میدان مغناطیسی دوار در ماشین به وجود آید . این میدان مغناطیسی یک ولتاژ سه فاز را در سیمپیچهای استاتور ژنراتور القاء مینماید.
در این ماشین دو عبارت در توصیف سیمپیچها بسیار مورد استفاده است: یکی سیمپیچهای میدان و دیگری سیمپیچهای آرمیچر است. بهطورکلی عبارت سیمپیچهای میدان به سیمپیچهایی گفته میشود که میدان مغناطیسی اصلی را در ماشین تولید میکند. عبارت سیمپیچهای آرمیچر به سیمپیچهایی اطلاق میشود که ولتاژ اصلی در آن القاء میشود برای ماشینهای سنکرون، سیمپیچهای میدان در رتور است.
روتور ژنراتور سنکرون در اصل یک آهنربای الکتریکی بزرگ است. قطبهای مغناطیسی در رتور میتواند از نوع برجسته و غیر برجسته باشد. قطب برجسته یکقطب مغناطیسی خارج شده از سطح رتور میباشد. از طرف دیگر یکقطب برجسته، یکقطب مغناطیسی همسطح با سطح رتور است. یک رتور غیر برجسته یا صاف معمولاً برای موارد 2 یا چهار قطبی به کار میروند. در حالی که رتور های برجسته برای 4 قطب یا بیشتر مورد استفاده هستند.
چون در رتور میدان مغناطیسی متغیر است برای کاهش تلفات، آن را از لایههای نازک میسازند. به مدار میدان در رتور باید جریان ثابتی اعمال شود. چون رتور میچرخد نیاز به آرایش خاصی برای رساندن توان DC به سیمپیچهای میدانش دارد.برای انجام این کار 2 روش موجود است :
1- از یک منبع بیرونی به رتور با رینگهای لغزان و جاروبک .
2- فراهم نمودن توان DCاز یک منبع توان DC ، که مستقیماًروی شفت ژنراتور سنکرون نصب میشود.
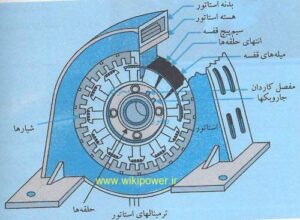
رینگهای لغزان بهطور کامل شفت ماشین را احاطه میکنند ولی از آن جدا هستند. یک انتهای سیمپیچDC به هر یک از دو انتهای رینگ لغزان در شفت موتور سنکرون متصل است و یک جاروبک ثابت روی هر رینگ لغزان سر میخورد . جاروبک ها بلوکی از ترکیبات گرافیک مانند هستند که الکتریسیته را بهراحتی هدایت میکنند ولی اصطکاک خیلی کمی دارند و لذا روی رینگها خوردگی به وجودنمیآورد. اگر سمت مثبت منبع ولتاژ DC به یک جاروبک و سر منفی به جاروبک دیگر وصل میشود. آنگاه ولتاژ ثابتی به سیمپیچ ، جدا از مکان و سرعت زاویهای آن ، میدان در تمام مدت اعمال میشود.
رینگهای لغزان و جاروبک ها به هنگام اعمال ولتاژ DC چند مشکل برای سیمپیچهای میدان ماشین سنکرون تولید میکنندآنها نگهداری را در ماشین افزایش میدهند ، زیرا جاروبک بایدمرتبا به لحاظ سائیدگی چک شود. علاوه بر آن ، افت ولتاژ جاروبک ممکن است تلفات قابلتوجه توان را همراه با جریانهای میدان به دنبال داشته باشد . علیرغم این مشکلات رینگهای لغزان روی همه ماشینهای سنکرون کوچکتر بکار میرود. زیرا راه اقتصادیتر برای اعمال جریان میدان موجود نیست .
ادامه مقدمه ماشین سنکرون
در موتورها و ژنراتورهای بزرگتر ، از محرک های بی جاروبک استفاده میشود تا جریان میدان DC را به ماشین برسانند یک محرک بی جارو بک ، یک ژنراتور AC کوچکی است که مدار میدان آن روی استاتور و مدار آرمیچر آن روی رتور نصب است خروجی سه فاز ژنراتور محرک یکسو شده و جریان مستقیم توسط یک مدار یکسو ساز سه فاز که روی شفت ژنراتور نصب است حاصل میشود که بهطور مستقیم به مدار میدان DC اصلی اعمال میگردد.
با کنترل جریان میدان DC کوچکی از ژنراتور محرک (که روی استاتور نصب میشود) میتوان جریان میدان را روی ماشین اصلی و بدون استفاده از رینگهای لغزان و جاروبک ها تنظیم کرد. چون اتصال مکانیکی هرگز بین رتور و استاتور به وجودنمیآید ، یک محرک جاروبک نسبت به نوع حلقههای لغزان و جاروبک ها ، به نگهداری کمتری نیاز دارد. برای اینکه تحریک ژنراتور بهطور کامل مستقل از منابع تحریک بیرونی باشد، یک محرک پیلوت کوچکی اغلب در سیستم لحاظ میگردد .
محرک پیلوت ، یک ژنراتور AC کوچک با مگنتهای (آهنربا ) دائمی نصب شده بر روی شفت رتور و یک سیمپیچ روی استاتور است . این محرک انرژی را برای مدار میدان محرک به وجودمیآورد که این بهنوبه خود مدار میدان ماشین اصلی را کنترل مینماید . اگر یک محرک پیلوت روی شفت ژنراتور نصب شود آنگاه هیچ توان الکتریکی خارجی برای راندمان ژنراتور لازم نیست .
بسیاری از ژنراتورهای سنکرون که دارای محرکهای بی جاروبک هستند ، دارای رینگهای لغزان و جاروبک نیز هستند بنابراین یک منبع اضافی جریان میدان DC در موارد اضطراری در اختیار است . استاتور ژنراتور های سنکرون معمولاً در دو لایه ساخته میشوند : خود سیمپیچ توزیعشده و گامهای کوچک دارد تا مؤلفههای هارمونیک ولتاژها و جریانهای خروجی را کاهش دهد .
چون رتور به سرعتی برابر با سرعت میدان مغناطیسی میچرخد ، توان الکتریکی با فرکانس 50 یا 60 هرتز تولید میشود و از ژنراتور بسته به تعداد قطبها باید با سرعت ثابتی بچرخد مثلا برای تولید توان 60هرتز در یک ماشین دو قطب رتور باید با سرعت 3600 دور در دقیقه بچرخد . برای تولید توان 50هرتز در یک ماشین 4 قطب ، رتور باید با سرعت 1500 دور در دقیقه دوران کند . سرعت مورد نیاز یک فرکانس مفروض همیشه از معادله زیر قابل محاسبه است [1]:
جهت مشاهده و دانلود ماشين سنكرون و سيستم تحريک استاتيک ژنراتورسنکرون و انواع اكسايتر کلیک کنید .
1- فرکانس
2- سرعت مکانیکی
3- تعدادقطبها
ولتاژ القایی در استاتور به شار در ماشین ، فرکانس یا سرعت چرخش ، و ساختمان ماشین بستگی دارد . ولتاژ تولیدی داخلی مستقیما متناسب با شار و سرعت است ولی خود شار به جریان جاری در مدار میدان رتور بستگی دارد.
ولتاژ درونی برابر ولتاژ خروجی نیست چندین فاکتور ، عامل اختلاف بین این دو هست :
1- اعوجاج موجود در میدان مغناطیسی فاصله هوا به علت جریان جاری در استاتور که به آن عکسالعمل آرمیچر میگویند.
2- خودالقایی بوبین های آرمیچر
3- مقاومت بوبین های آرمیچر
4- تأثیر شکل قطبهای برجسته رتور
وقتی یک ژنراتور کار میکند و بارهای سیستم را تغذیه میکند آنگاه :
1- توان مستقیم و راکتیو تولیدی بهوسیله ژنراتور برابر با مقدار توان تقاضا شده بهوسیله بار متصل شده به آن است .
2- نقاط تنظیم گاورنر ژنراتور ، فرکانس کار سیستم قدرت را کنترل مینماید.
3- جریان میدان ( یا نقاط تنظیم رگلاتور میدان ) ولتاژ پایانه سیستم قدرت را کنترل مینماید.
این وضعیتی است که در ژنراتورهای جدا و به فواصل دوراز هم وجود دارد.
جهت مشاهده نمونه های دیگر از فصل دوم پایان نامه مهندسی برق کلیک کنید.
مدل های مختلف ماشین سنکرون :
با توجه به تعداد سیم پیچی های روتور در محور طولی و عرضی و همچنین درجه ی پیچیدگی معادلات در کار برد های مختلف، مدل های زیر برای مدل سازی ماشین سنکرون پیشنهاد میشود[14].
- مدل کلاسیک (0.0)
- تنها مدار تحریک (1.0)
- مدار تحریک با یک دمپر معادل در q محور (1.1)
- مدار تحریک با یک دمپر معادل در محور d
الف- یک دمپر روی q محور . (2.1)
ب- دو دمپر روی q محور (2.2)
- مدار تحریک با دو مدار معادل دمپر روی محور d
الف- یک دمپر روی q محور (3.2)
ب- دو دمپر روی q محور (3.3)
در طبق بندی مدل های ماشین، عدد اول نشان دهنده ی تعداد سیم پیچ ها روی محور d است. عدد دوم تعداد سیم پیچی ها روی محور q را نشان میدهد. به علاوه، این اعداد تعداد متغیر های حالتی را که در محور d و q در نظر گرفته شده است را بیان می کند.
برای مثال، در مدل کلاسیک از مدار سیم پیچ دمپر و میدان شار نشتی صرف نظر شده است. لذا، تمام متغیر های حالت در سیم پیچ روتور نادیده گرفته شده اند.در نتیجه این مدل به صورت 0.0 نشان داده میشود.
کاربرد مدل های مختلف:
مدل (2.2)به طور وسیعی در تحقیقات مورد استفاده قرار گرفته است. مدل (3.3) به عنوان دقیق ترین و کاربردی ترین مدل برای توبوژنراتور ها معرفی شده است. از طرف دیگر، مدل (2.1) و (1.1) به طور وسیعی در هیدرو ژنراتور ها مورد استفاده قرار می گیرد[15]. همچنین باید اشاره شود، مدل های مرتبه ی بالا نتایج بهتری برای کاربردهای مختلف فراهم می کنند اما این مدل ها به تعیین اطلاعات دقیق پارامتر ها نیاز دارند.
با توجه به محدودیت دسترسی به پارامترها و همچنین مطالعه ی سیستم های بزرگ، می توان مدل (1.1) را در صورت تعیین صحیح پارامترها، کافی دانست[16].
در ادامه، مدل (0.0) ، (2.1) و (2.2) به صورت ریاضی تحلیل شده اند. همچنین نتایج حاصل از شبیه سازی این مدل ها برای تعیین پارامتر های اساسی ماشین نیز در ادامه آمده اند.
ماشین سنکرون
نمونه ای از مراجع جهت مطالعه بیشتر
- [1] R. H. Park, “Two-reaction theory of synchronous machines generalized method of analysis-part I,” American Institute of Electrical Engineers, Transactions of the, vol. 48, no. 3, pp. 716–727, Jul. 1929.
- [2] P. C. Krause, Analysis of Electric Machinery and Drive Systems, 2 edition. New York: Wiley-IEEE Press, 2002.
- [3] P.-J. Lagace, M. H. Vuong, and K. Al-Haddad, “A time domain model for transient simulation of synchronous machines using phase coordinates,” in IEEE Power Engineering Society General Meeting, 2006, 2006, p. 6 pp.–.
- [4] A. Campeanu, S. Enache, I. Vlad, G. Liuba, L. Augustinov, and I. Cautil, “Simulation of asynchronous operation in high power salient pole synchronous machines,” in 2012 XXth International Conference on Electrical Machines (ICEM), 2012, pp. 1823–1828.
- “IEEE Guide: Test Procedures for Synchronous Machines Part
- [5] S. Shisha and C. Sadarangani, “Analysis of Losses in Inverter Fed Large Scale Synchronous Machines using 2D FEM Software,” in 7th International Conference on Power Electronics and Drive Systems, 2007. PEDS ’07, 2007, pp. 807–811.
- [6] H. Radjeai, R. Abdessemed, S. Tnani, and E. Mouni, “A Method to Improve the Synchronous Machines Equivalent circuits,” in EUROCON, 2007. The International Conference on #34;Computer as a Tool #34;, 2007, pp. 2367–2372.
- [7] S. D. Umans, “Total-Flux Representation of Synchronous Machines,” IEEE Journal of Emerging and Selected Topics in Power Electronics, vol. 2, no. 2, pp. 341–347, Jun. 2014.
- [8] D. C. Ludois, J. K. Reed, and K. Hanson, “Capacitive Power Transfer for Rotor Field Current in Synchronous Machines,” IEEE Transactions on Power Electronics, vol. 27, no. 11, pp. 4638–4645, Nov. 2012.
- [9] P. Kundur, Power System Stability and Control. New York: McGraw-Hill Professional, 1994.
- [10] Z. Q. Zhu and X. Liu, “Novel stator electrically field excited synchronous machines without rare-earth magnet,” in 2014 Ninth International Conference on Ecological Vehicles and Renewable Energies (EVER), 2014, pp. 1–13.
| رشته | برق |
| گرایش | قدرت |
| تعداد صفحات | 43 صفحه |
| منبع فارسی | دارد |
| منبع لاتین | دارد |
| حجم | 430 KB |
| فرمت فایل | ورد (Word) |
| موارد استفاده | پایان نامه (جهت داشتن منبع معتبر داخلی و خارجی ) ، پروپوزال ، مقاله ، تحقیق |
نقد و بررسیها
هنوز بررسیای ثبت نشده است.
موارد مرتبط
نقد و بررسیها
هنوز بررسیای ثبت نشده است.