قیمت 19,000 تومان
طراحی خلبان خودکار
طراحی خلبان خودکار
ادبیات طراحی خلبان خودکار با استفاده از سیستم موقعیت یاب و حذف سیستم وضعیت سنج برای هواپیماهای بدون سرنشین
خلبان خودکار
فصل دوم : اصول و مبانی تئوریک….
2-1 منابع خطاي سنسورهای ناوبری اینرسی…
2-1-1 خطاي باياس….
2-1-2 ضریب مقياس….
2-1-3 عدم توازن..
2-1-4 نويز.
2-2 سیستم موقعیت یاب جهانی و تشریح خطاهای GPS..
2-2-1 تشريح سيستم تعيين موقعيت جهاني…
2-2-2 اصول تعیین موقعیت با جی.پی.اس….
2-2-3 شبیه سازی حرکت مداری ماهوارهها
2-2-4 عوامل و پارامترهاي خطا در سيستم تعيين موقعيت جهاني…
2-3 مروري بر تئوريهاي تخمين و تلفيق خلبان خودکار …
2-3-1 ديناميك فيلتر كالمن…
2-3-2 الگوريتم فيلتر كالمن…
2-3-3 محدوديتهاي الگوريتم فيلتر كالمن…
2-3-4 فيلتر كالمن توسعه يافته.
- الگوريتم فيلتر كالمن توسعه يافته.
- محدوديتهاي الگوريتم فيلتر كالمن توسعه يافته.
2-3-5 فيلتر كالمن خنثي…
- انتخاب مجموعه نقاط سيگما
- الگوريتم فيلتر كالمن خنثي.
- مزاياي فيلتر كالمن خنثي.
- محدوديتهاي فيلتر كالمن خنثي.
2-3-6 فيلتر كالمن ذرهاي…
- الگوريتم فيلتر كالمن ذرهای.
2-3-7 فیلتر کالمن مکعب CKF..
- الگوريتم فيلتر كالمن مكعبي.
2-3-8 جمع بندي و نتيجه گيري…
2-4 کنترل کننده های تناسبی- انتگرالی- مشتقی (PID). خلبان خودکار
2-4-1 اساس حلقه کنترلی…
2-4-2 تئوری کنترل کننده های PID…
- عبارت تناسبی.
- عبارت انتگرالی.
- عبارت مشتقی.
- خلاصه.
2-4-3 تنظیم کردن حلقه.
- تنظیم دستی.
- روش زیگلر- نیکلس…
2-4-4 نرم افزار تنظیم PID…
2-4-5 اصلاحات الگوریتم PID…
2-4-6 محدودیت های کنترل PID…
2-4-7 کنترل اتصال سری…
2-4-8 انجام کنترل PID فیزیکی…
2-4-9 پیاده سازی روش PID با زبان برنامه نویسی…
طراحی خلبان خودکار
خلبان خودکار

منابع خطای سنسور های ناوبری اینرسی
در سيستم ناوبري اينرسي خطاها ناشی از رفتار شتاب سنجها، ژیروسکوپ ها و همچنین خطاهاي محاسباتي و… بر روي عملكرد سيستم مؤثر است همچنین اثر این خطاها با گذشت زمان و حل معادلات ناوبری بیشتر شده و دقت را کاهش میدهند. کارایی حسگرهای اینرسی (شتاب سنجها و ژیروسکوپ ها) به اندازه زیادی تحت تأثیر خطاهای مختلفی است که با استفاده از مراجع ]1[ و ]10[ در این فصل به آنها پرداخته می شود.
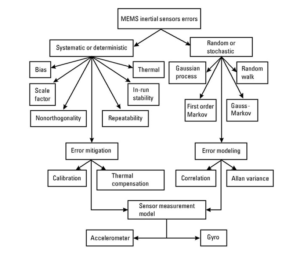
شكل 2.1 خطاهاي سيستماتيك سنسورهاي اينرسي]10[
خطاهای اصلی که از رفتار سنسورها حادث میشود ، عبارتند از:
- بایاس
- ضریب مقیاس
- عدم توازن
- نویز
خطاي باياس
خطای بایاس برای شتاب سنج و ژیروسکوپ یک مقدار ثابت در نظر گرفته میشود که میزان انحراف از صفر میباشد. هنگامی که در شتاب سنج یا ژیروسکوپ ورودی نداریم، يعني در وضعيت ايستايي در خروجی آنها مقداری ظاهر میگردد. خطای ژیروسکوپ ها اغلب بر حسب درجه بر ساعت بیان میشود و خطای شتابسنجهای بر حسب نسبتی از شتاب جاذبه مثلاً هزارم شتاب جاذبه (mg) آورده میشود. عموماً بایاس از دو بخش تشكيل میشود، يكي قسمت معین و ديگري قسمت تصادفی تشکیل میشود. با کالیبراسیون میتوان قسمت معین بایاس را جبران نمود ، ولی قسمت تصادفی آن كه رانش بایاس[1] نامیده میشود، نمیتوان جبران نمود. رانش بایاس به طور ذاتی تصادفی بوده و باید به صورت یک فرایند تصادفی مدل شوند.
عموماً اندازه بایاس مستقل از حرکت حسگر است و بعد از هر بار روشن شدن سیستم ناوبری به صورت تصادفی تغییر میکند. اهمیت خطای رانش در شتابسنجهای با توجه به اینکه دو بار انتگرال گیری از شتاب، موقعیت سیستم ناوبری را میدهد، روشن میشود. این خطا با گذشت زمان اثر خود را بیشتر نشان خواهد داد. بایاس ژیروسکوپ در مقایسه با بایاس شتاب سنج از اهمیت کمتری برخوردار است.
ضریب مقياس
نسبت سیگنال خروجی به مقدار ورودي را ضریب مقیاس میگویند. ضریب مقیاس اغلب به صورت شیب یک خط مستقیم تعیین میشود که این خط رابطه بین دادههای ورودی و خروجی را مشخص میکند. خطای ضریب مقیاس به طور ذاتی معین است و با کالیبره کردن میتوان آن را مشخص کرد.
پایداری ضریب مقیاس ممکن است برای توصیف ضریب مقیاس به کار رود. پایداری ضریب مقیاس توانایی حسگر اینرسی برای حس کردن دقیق سرعت زاویهای (یا شتاب) در سرعت زاویهای ها یا شتابهای مختلف است. پایداری ضریب مقیاس میانگین تغییرات ضریب مقیاس با دما و میانگین تکرارپذیری آن است که بر حسب PPM[2] بیان میشود. تغییرات ضریب مقیاس به دلیل نقایص سیستم میباشد و اثر کوچکی در مقایسه با خطای رانش دارد.
جهت مشاهده نمونه های دیگر از فصل دوم مهندسی برق کلیک کنید.
عدم توازن
عدم توازن در محورها خطایی است که به دلیل نقص در نصب حسگرها در IMU حاصل میشود. این خطا اغلب باعث میشود که محورهای تعریف شده در مختصات بدنی سیستم ناوبری اینرسی متعامد نباشد. در نتیجه هر محور تحت تأثیر اندازه گیریهای دو محور دیگر در مختصات بدنی قرار میگیرد و اطلاعات نادرستی را خواهد داد. عدم توازن در محورها معمولاً در معادلات خطای ناوبری مدل میشود و جبران سازی روی این خطاها صورت میگیرد و به صورت الگوریتمی قابل اصلاح هستند.
نويز
نویز یک سیگنال اضافی است که از خود حسگر نتیجه میشود و یا از تجهیزات الکترونیکی که برای اندازهگیری خروجی حسگر استفاده میشوند، ایجاد میگردد. نویز یک سیگنال تصادفی است که نمیتوان آن را با روشهای معین از سیگنال اصلی جدا نمود و تنها میتوان آن را با یک فرایند تصادفی مدل کرد.
در سال 1966 دیوید آلن روش ساده آنالیز تغییرات را جهت مطالعه ناپایداری فاز و فرکانس در نوسانسازهای دقیق ارائه نمود که بعدها به روش آلان واریانس[3] معروف شد.
روش آلان واریانس هفت جمله نویز را که در سیستمهای سنسور اینرسی قابل توجه میباشند، مورد بررسی قرار میدهد که از جملههای اساسی و مهم آن زاویه گام تصادفی[4] نرخ گام تصادفی[5] ناپایداری باياس[6]، نویز كوانتيزه[7]، شیب نرخ دریفت[8] بوده و دو جمله غیر اصلی نویز سینوسی[9] و نویز همبستگی نمایی[10]را نیز میتوان از طریق روش مذکور معرفی و مشخص نمود.
آلان واریانس را میتوان به عنوان معادل حوزه زمانی برای مشخصه فرکانسی [11]PSD در نظر گرفت. در این حالت به جای اینکه توان به صورت تابعی از فرکانس نمایش داده شود، به صورت تابعی از زمان نشان داده میشود. البته لازم به ذكر است كه پارامتر مستقل زمان در روش آلن واريانس، يك بازه زماني براي ميانگينگيري است. در این قسمت ابتدا روش استخراج منحنی آلان واریانس را معرفی میکنیم و در ادامه، به نحوه محاسبه انواع نویزها در یک ژیروسکوپ خواهیم پرداخت.]10[
[1] Drift
[2] Part Per Million
[3] Allan variance
[4] Angle Random Walk
[5] Rate Random walk
[6] Bias instability
[7] Quantization noise
[8] Drift rate ramp
[9] Sinusoidal noise
[10] Exponentially Correlated noise
[11] Power Spectral Density
خلبان خودکار
تشريح سيستم تعيين موقعيت جهانی
يک سيستم ناوبري دربرگيرنده سنسورهايي است که شرايط موجود پروازي را اندازهگيري ميکند و يک نرمافزار ناوبري، برنامهاي است که شرايط پروازي را تخمين ميزند. يکي از پرکاربردترين سنسورهاي ناوبري، گیرندههای GPS است. اين سنسور، موقعيت کاربر را به صورت سه بعدي در دستگاه مختصات زمين مرکز-زمين ثابت (ECEF) اندازهگيري ميکند. اين سنسور سيگنالهايي را از صورت فلکي GPS ، که از تعداد 24 ماهواره در شش مدار تشکيل شده را دريافت مينمايد.
به واسطه اين حقيقت که مدارهاي صورت فلکي GPS و در نتيجه موقعيت ماهوارههاي GPS از قبل شناخته شدهاند، موقعيت جاري کاربر با کمک سیگنالهای دريافتي و خواندن فایل rinex و بر اساس قانون مثلثاتي، قابل محاسبه ميشود. اين سيگنالها، تحت تأثیر شرايط گوناگون محيطي مثل اثر لايه يونسفر و تروپسفر بر سيگنال، قرار دارند و در چنين وضعيتي خطا و انحرافات به وجود آمده، منجر به محاسبه موقعيت اشتباه شده و اين خود به طور مستقيم، راه حل ناوبري محور فراهم شده توسط نرم افزار ناوبري را متأثر ميسازد.
مدلهاي خطاي بكار گرفته شده در اين نرم افزار عبارتند از: يونسفريک، تروپسفريک، خطاي ساعت ماهواره و باياس ساعت گيرنده. اين فصل به طور خاص بر روي سنسور GPS متمرکز شده و به معرفي الگوريتم محاسبه موقعيت کاربر و در نهايت شبيهسازي کامل اين فرآيند که در برگيرنده شبيهسازي مداري موقعيت ماهوارهها است، میباشد.
سيستم تعيين موقعيت جهاني را ميتوان در سه بخش مجزاي زير در نظر گرفت:
- بخش فضا space segment
- بخش كنترل control segment
- بخش كاربر user segment
بخش فضا، در حقيقت مشتمل بر ماهوارههايGPS است که مدارهاي ماهوارهها تقريباً دایر وی است.
طراحی خلبان خودکار
منابع و مراجع جهت مطالعه بیشتر
| [1] Amonlirdviman, K. (1998),” Experimental Evaluation of Trajectory Guidance Systems Using Single Antenna GPS”, Final Research Report 16.622, Dec. 8 . | |
| [2] Axelrad, P., and Brown, R.G. (1996), “GPS Navigation Algorithms, GPS: Theory and Application, ed. Parkinson and Spilker”, AIAA Progress in Astronautics and Aeronautics Vol. 163, pp. 409-433. | |
| [3] Dan’Simon. “Optimal State Estimation Kalman, Hinf”, Nonlinear Approaches. 1nd Edition, New York: Wiley & Sons, 2006. | |
| [4] Bock, Y., 1996. Reference System. In: Teunissen, P J G. and Kleusberg, A. (Eds.), GPS for Geodesy, Springer. | |
| [5] Titterton’ D.H. and Weston’ J.L.”Strapdown Inertial Navigation Technology”. 2nd Edition, AIAA, 2004. | |
| [6] Aggarwal’P., Syed’Zainab. Jitendra.”MEMS-Based Integrated Navigation”. 1nd Edition, Artech House, 2010. | |
| [7] Zhang’ Xin. Li’ Yong.”Allan Variance Analysis on Error Characters of MEMS Inertial Sensor for FPGA-based GPS/INS System”, Thesis New South Wales University,Australia, 2009. | |
| [8] Gebre-Egziabher, D., Hayward, R.C., and Powell, J.D. (1998),”A Low-Cost GPS/Inertial Attitude Heading Reference System (AHRS) for General Aviation Applications”, IEEE PLANS 98, Palm Springs, CA, April 20-23, pp. 518-525. | |
| [9] Gaylor’ D. Edvard. “Integrated GPS/INS Navigation System Design for Autonomous Spacecraft Rendezvous “For Degree of Doctor of Philosophy The University of Texas At Austin, 2003.
[10] Burgers’ G. and Leeuwen J’ and Evensen’ G. “Analysis scheme in the ensemble Kalman filter”, IEEE, 1998. |
|
| [11] Henderson, R.O. (1997), “A Study of GPS Based Attitude Indicators and Instrument Update Rates”, AIAA Mid-Atlantic Region I Student Conference, Old Dominion University , April. | |
| [12] Wan’ E.A. and Merwe R’. “The unscented Kalman filter for nonlinear in Adaptive Systems estimation”, IEEE, 2000. | |
| [13] Arasaratnam’ I.”Cubature Kalman Filtering: Theory & Application”, P.h.D Thesis McMaster University, 2009. | |
| [14] Kornfeld, R.P., Hansman, R.J., and Deyst, J.J. (1998b),” Preliminary Flight Tests of Pseudo-Attitude Using Single-Antenna GPS Sensing ”, 17th Digital Avionics Systems Conference (DASC),31 Oct.-6 Nov.,Bellevue,WA. |
| رشته | برق |
| گرایش | الکترونیک |
| تعداد صفحات | 66 صفحه |
| منبع فارسی | دارد |
| منبع لاتین | دارد |
| حجم | 960 KB |
| فرمت فایل | ورد (Word) |
| موارد استفاده | پایان نامه (جهت داشتن منبع معتبر داخلی و خارجی ) ، پروپوزال ، مقاله ، تحقیق |
نقد و بررسیها
هنوز بررسیای ثبت نشده است.
موارد مرتبط




نقد و بررسیها
هنوز بررسیای ثبت نشده است.